
Hello!
I’m Achintya, a robotics engineer working on Large Behavior Models at Toyota Research Institute. Previously, I helped develop legged robots at IHMC and Boardwalk Robotics. I got my Bachelor’s in Computer Engineering from Georgia Tech, where I was part of the LIDAR lab, working on tactile sensing and loco-manipulation research.
I work across the robotics stack on controls, learning, simulation, data visualization and logging tools, and sensing. I’m always interested in getting stuff working on hardware and have worked on software-hardware integration for a bunch of robots.
Stuff I've worked on
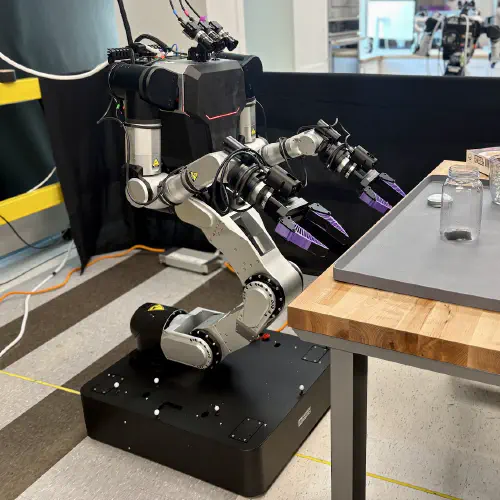
RB-Y1
ML, Controls, Teleop, Logging, Perception, Hardware bringup

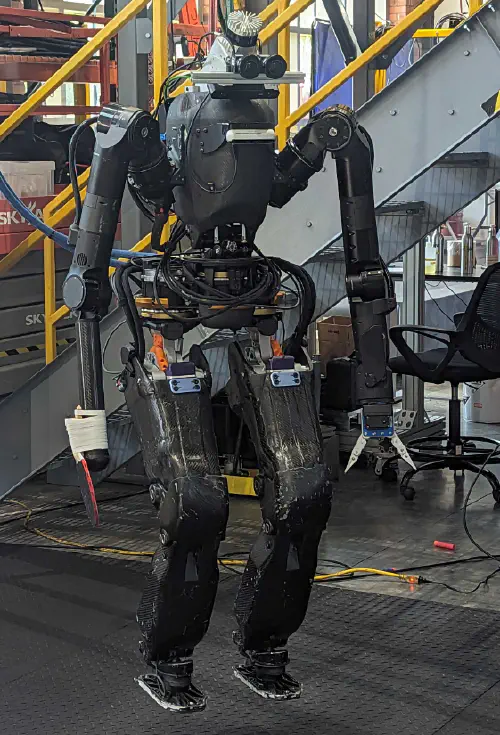
Alex
Controls, RL, Perception, Hardware bringup, Firmware, Electrical+Mechanical Integration
Nadia
Custom hydraulics, controls, RL, Simulation, Logging, Teleop, Perception, Operator UI
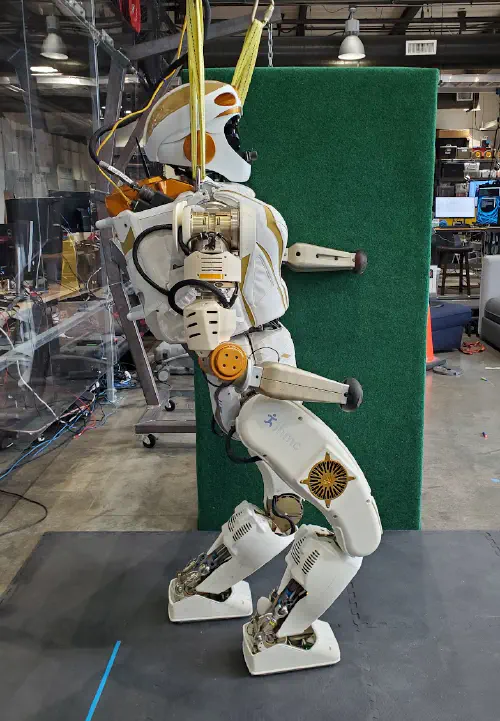
Valkyrie
Multi-contact scripting and planning, Whole-body control, Teleoperation
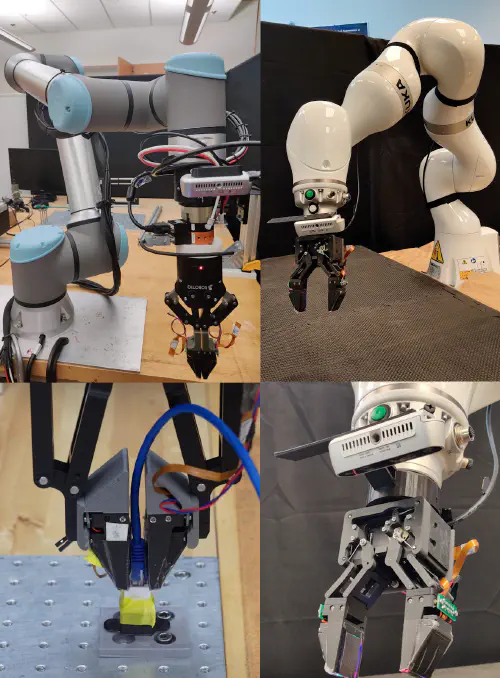
GelSight + KUKA iiwa and UR-10
Autonomous cable routing using tactile sensing, motion planning, sensor design
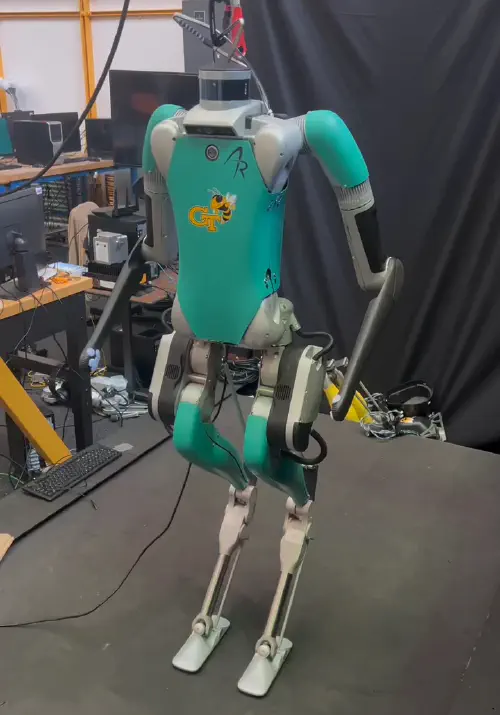
Digit
Locomotion controls and planning, simulation, troubleshooting and testing

Cassie + Kinova Jaco 2
Comms, low-level control, loco-manipulation, electronics integration, hardware testing

Mini Cheetah + “SLAMbox”
SLAM, Path Planning, ROS Nav, Perception package design
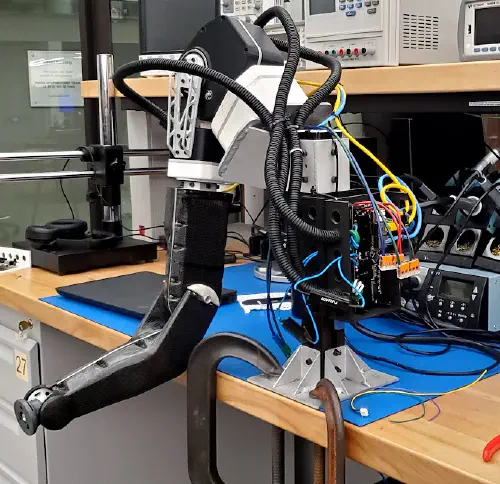
Athena: a low cost, backdrivable arm
20:1 QDDs, ODrives, Custom encoders + CAN bus comms, Impedance control using Drake